
MULTI-HOP DISTRIBUTED COORDINATION IN COGNITIVE RADIO NETWORKS
Abdallah Ijjeh
Department of Electrical and Electronic Engineering, Al-Balqa` Applied University / AlHuson University College, Irbid, Jordan
ABSTRACT
Control Channel Dilemma (CCD) is still an open problem for Cognitive Radio Network (CRN). In this article, we investigate and present a novel solution of Distributed Coordination in CRN to mitigate the necessity for a common control channel. This scheme is based on the fact that a group of nearby nodes almost detects the same frequency spectrum. That will allow every group of close nodes to choose a node called coordinator, which in its turn chooses a reliable control channel for the group, then the reaming nodes become slaves. Furthermore, the nodes that belong to two or more groups have an important role in maintaining the network connectivity since they act as bridges to relay data between different groups. The proposed approach carries potentials to provide robust operation under network dynamics conditions. Finally, several simulation experiments are presented to validate the proposed approach.
KEYWORDS
Cognitive Radio Networks, Distributed Coordination, Control Channel Dilemma, Spectrum Heterogeneity, Coordinator, Slave, Dual-slave
1.INTRODUCTION
In recent years Cognitive Radios (CRs) have emerged as a promising technology to enhance spectrum utilization by applying opportunistic on-demand spectrum access techniques [1] [2]. Traditionally, the radio spectrum is statically licensed and split into different zones for different organizations. Spectrum measurements carried out by FCC and other organizations have shown significant temporal and geographical variations in the utilization of the licensed spectrum, ranging from 15 to 85 percent [3] [4] [5]. These measurements motivated the necessity for a more efficient and agile spectrum utilization and allocation policies. Consequently, the FCC has been revising its regulations to allow for more efficient spectrum utilization. CR technology stands as a good candidate since the CR’s are well known for their cognitive capability and reconfigurability [4].
One of the main challenges to enable an efficient CRN operation in multi-hop non-centralized environment is to find a reliable mechanism for exchanging control information. Typically, to obtain such a mechanism, one can use a licensed common control channel (CCC) for control information exchange [6]. Different MAC protocols [1] [4] [7] were designed for CRNs assuming the existence of such a channel. While this approach may look simple, it is contradictory to the opportunistic nature of CRNs and can cause a single point of failure. Furthermore, under high traffic load the CCC may go under performance bottleneck [8]. To handle this issue, many solutions have been proposed, none of which are totally satisfactory [7].
The most intuitive way to design medium access control MAC protocol for CRNs is by assuming a predetermined non-dedicated CCC that is known to all users. This control channel can be implemented either as a channel in an unlicensed band or as an ultra-wideband (UWB) channel [6]. Unfortunately, both solutions of non-dedicated schemes have several draw backs that make their practicality under question. Specifically, using UWB leads to a small control transmission range, which might jeopardize CRN connectivity. On the other hand, single point of failure and bottleneck performance may arise when using a fixed CCC can cause a single point of failure. Even worse, in a relatively big network area, a CCC may not be available to all CR users because different users may see different spectrum holes [7].
A more elaborate way to solve the CC dilemma can be obtained by considering the fact that neighbouring CR’s typically have a similar view of spectrum availability. Therefore, coordination mechanism based on clustering concept can be used to enable reliable coordination between CR users [7]. Each cluster dynamically selects a local CCC for exchanging control information. However, by applying such an approach in multi-hop CRNs environment, the network is limited by several deployment challenges, such as, determining the cluster, ensuring connectivity sizes. The third way to solve the control channel dilemma is to use Hopping-Based Control Channel (HBCC) [6]. According to this approach, CR users hop across all available channels according to a predefined hopping sequence. During this process, a CR different CR users exchange control information to choose the optimal channel to use for data transmission. Once, they successfully exchange control information, they stop hopping and start data transmission. This process will be repeated every time communication between CR’s is required. However, the synchronization process remains the main difficulty in applying this approach [9].
Previous works have been done to tackle the CC dilemma [10] [11] [7] [12]. For instance in [13] the authors proposed an approach in which to set up coordination groups. In that approach the users need to obtain some information about neighbours, especially their spectrum availability. This is done by channel scanning and beacon broadcast. After the discovery process each node will have the necessary information about its neighbours and their available channels, based on that the CR user will select the control channel. In [3] the authors proposed a resource-aware rendez-vous algorithm based on a spectrum hole management scheme. In their approach they proposed an algorithm that can establish the control channel between CRs and the base station even when there is available direct channel between them. That can be done simply by adding a relay function that can ensure more reliable communication services in the CR networks.
In this paper, we propose a new distributed coordination scheme that takes spectrum heterogeneity and the challenges presented earlier into consideration. CR’s in our scheme are self-organize into groups and coordinate using locally available common channels. This approach significantly improves connectivity scalability, and reduces deployment costs. This approach is dedicated to solve control channel dilemma (CCD). As a first step, we propose a virtual groupbased coordination scheme and develop distributed group setup and maintenance algorithms where CR’s chooses coordination channels adaptively. In the second step we introduced the concept of dual slave and triple slave users to increase system reliability.
After this introduction, the rest of this paper is organized as follows; in section II we present hypothesis and the basic assumptions about the network and the available spectrum properties, namely, spectrum heterogeneity principle and its impact on the coordination between CR users. In Section III, we present the general concept of distributed coordination and an algorithm to perform distributed coordination virtual groups and describe the implementation using legacy MAC protocols and a modified MAC protocol in Section III. In Section IV, we discuss the simulation setup and results and compare with previous solutions to control channel dilemma.
2. PRELIMINARIES
In this section we present the basic assumptions regarding the CRN and the spectrum availability conditions.
2.1. Network model
We consider network consisting both primary users (PR’s) and secondary users (CR’s). The spectrum is divided into N – non-overlapping orthogonal channels. Secondary users are allowed to use licensed spectrum if they don’t interfere primary users [13]. Moreover, those secondary users are assumed to be static or quasi-static and each user can accurately measure its available channels without affecting the licensed networks PR’s that use the same spectrum bands. Secondary users are also assumed to be capable of communicating by choosing the same channel [14]. We also assume that each CR user has a multi-radio device and uses a single half-duplex transceiver, and can either transmit or receive on one channel at a time [6].
2.2. Spectrum Heterogeneity effects
As mentioned earlier, available spectrum is not always completely utilized by PR’s, hence, CR’s can use the holes in the spectrum for establishing connection. However, because different CR’s have different channel availability list, it will be very difficult or even impossible to find a common control channel that covers all the geographical are of the CRN.
To show that, we have done a simulation for a CRN deployed in an area with heterogeneous spectrum availability. The results we obtained show that while CR users do share significant spectrum with local neighbours, a common channel is rarely available to all users in the network (figure 1).
 Figure 1, Probability of dynamic global control channel versus Pidle
Figure 1, Probability of dynamic global control channel versus Pidle
In figure 1 we can notice the difficulty of finding dynamic global common control channel for nodes distributed in L x L grid area. Even if this channel does exist, different nodes will need global information to know it which violates our assumption of a non-centralized ad hoc network.
3. DISTRIBUTED COORDINATION MODEL
As discussed in the previous section, spectrum heterogeneity reduces the feasibility of using a single common control channel. However, the fact that nearby users share similar spectrum availability motivates us to propose a distributed coordination scheme. In this section, we present the general concept behind our scheme and a detailed algorithm to generate distributed groups. This scheme is completely distributed (i.e. it only requires local information). That will eliminate the necessity for global synchronization; which will minimize the overhead. Furthermore, robustefficient coordination and better adaptability for spectrum heterogeneity will be achieved.
3.1. General Concept
In our distributed coordination scheme, CR’s are self-organized into local coordination virtual groups based on spectrum availability. Nodes on each group form a single-hop or two-hp network and use a common coordination channel and have one coordinator node. Assuming users maintain connections with each other through local control channel, only members in the same group can directly communicate with each other. Network connectivity is maintained by users at group boundaries that have access to multiple control channels. These “bridge” nodes or “slaves” relay data between groups and connect users in neighbour regions with different spectrum availabilities.
3.2. Distributed Coordination Algorithm
To set up the common channel in a given neighbourhood, and to achieve balanced power consumption scenario every node will have equal probability of becoming group coordinator. This can be realized by setting a timer of a uniform distribution period.
 Figure2, different kinds of nodes in the CRN according to their functionality
Figure2, different kinds of nodes in the CRN according to their functionality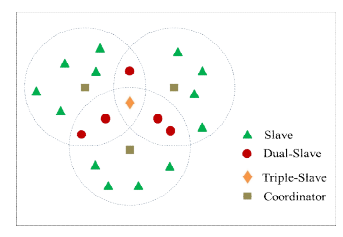
The algorithm is described by the following steps:
- The first CR user with its timer to be expired broadcasts an alert message to its neighbouring CR users, indicating that it will switch to a new control channel after to seconds. This coordinator CR user instructs other neighbouring CR users to switch to a new control channel for Tsw seconds in a timestamp message.
- All CR users that received the alert message resynchronize their timers according to to and follow the coordinator. We call such CR users slaves.
- If a slave CR user receives multiple alert messages that indicate the same next control channel selection, it will chose the strongest one, but will keep track for other control channels in case of interruption form the PR’s in that cluster
- If a slave CR user receives multiple alert messages that indicate different control channels, it adopts all the control channel selections for the time indicating in the received messages. This border CR user is called to as a dual-slave CR user or tripleslave …etc. depending on the number of alert messages they received. Those multi-slave CR users have the same common control channels as other neighbouring CR users that belong to different neighbouring clusters. Hence, the can function as bridges between different clusters to maintain connectivity.
- If a CR user losses synchronization for any reason, it conducts channel scanning to find an appropriate CC. Once identifying that CC, it requests a timestamp message to reset its own timer.
- Every time the cluster life time Tsw expires, the nodes in that cluster repeat the same procedure from step I.
One can notice that the coordinator and the slave CR users from a virtual cluster. Thus, there are no problems of inter-cluster communications and interference. This scheme flexible and allow for easy adaptation for topology changes. Moreover, it requires simple synchronization requirements among neighbouring CR users.
4. PERFORMANCE EVALUATION
In this section we present some simulation results to evaluate the performance of the new proposed coordination control channel scheme. All simulations were carried out using C language. In the following experiments, we consider Nuser the number of users in a CRN coexists with a number of PRN’s in 1000×1000 meter2 region. The area is divided into grids each of 10 ×10 meter2area as shown in figure 3.
 Figure 3, CR’s spatial distribution in the grid at the beginning of simulation
Figure 3, CR’s spatial distribution in the grid at the beginning of simulation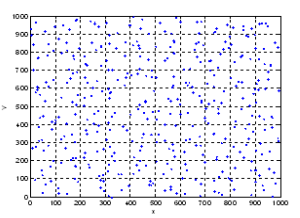
For balanced nodes distribution overall the area we assume same number of CR’s in each grid.We assume Nchannel non-overlapping channels. The average idle duration for each channel is μi and λi for average busy duration. The switching time period (the duration of occupying control channel by coordinator) is set to be Tsw. the time needed to transmit single packet is . All nodes are assumed to move in random direction, random step size of maximum value D << 1000 meters (the covered region dimensions). Each CR user has Nctrl transceivers for control channel and Nt for data transmission, where Nctrl << Nt and transmission radius of R meters.
Figure 4 shows the relation between switching time period and probability of control channel availability (PCCA) for different Pidle probabilities for the network, for both single hop and two hop systems the performance is almost the same.
 Figure 4, probability of control channel
availability versus switching time period, for Pidle = 50%
Figure 4, probability of control channel
availability versus switching time period, for Pidle = 50%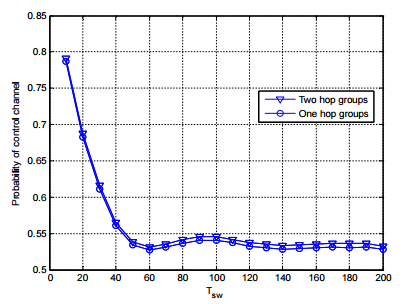
Figure 5 shows the relation between switching time period and PCCA for different Pidle probabilities. As expected higher the PCCA decreases as the cluster life time Tsw increases until it saturates to Pidle eventually
 Figure 5, probability of control channel availability versus switching time period
Figure 5, probability of control channel availability versus switching time period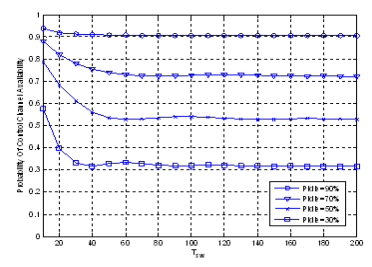
Figure 6, shows the PCCA availability verses Pidle for different transmission radius, when transmission radius increases the PCCA increases because increasing the transmission radius will increase the searching region, hence, there is a higher probability to find a control channel.
 Figure 6, probability of control channel availability verses Pidle
Figure 6, probability of control channel availability verses Pidle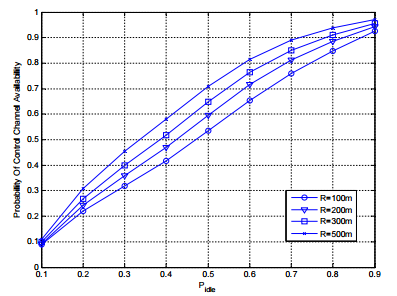
Figure 7, shows the probability of control channel availability verses Pidle for single hop and two hop systems. As we can notice, the two hop system provides with a slightly higher probability to find a control channel since it increase the range of searching for that channel.
 Figure 7, probability of control channel availability verses Pidle
Figure 7, probability of control channel availability verses Pidle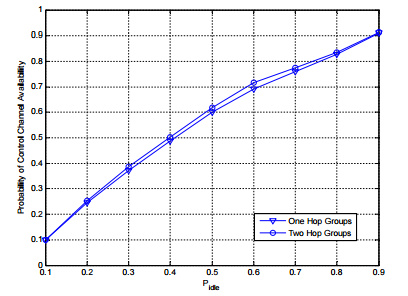
Figure 8, shows the relation between number of groups versus transmission radius for single-hop system and two-hop systems. It is obvious that a small transmission radius leads to a small group size; hence, more groups are necessary to cover the entire area.
 Figure 8, number of groups versus transmission radius
Figure 8, number of groups versus transmission radius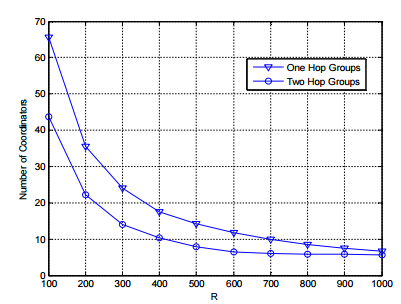
Figure 9, shows the number of nodes of different types for single hop and two hop system at R=300m, Pidle=50% for 100 CR users. As we can notice, high number of dual-slaves and tripleslaves is obtained. That has a significant role in maintaining the connectivity between neighboring clusters and eventually in the entire area of the CRN.
 Figure 9, number of nodes
of different types for single hop and two hop system at R=300m, Pidle=50% for
100 CR users.
Figure 9, number of nodes
of different types for single hop and two hop system at R=300m, Pidle=50% for
100 CR users.
4. CONCLUSIONS
In this paper we proposed a distributed coordination scheme without relying on the availability of a prespecified (licensed or unlicensed) fixed control channel. Therefore, the security and the single point of failure issues, caused by using a fixed control channel, are significantly mitigated. The simulation results have shown efficiency of this approach to handle the control channel dilemma locally at the cluster level. Moreover, the bridge nodes (dual-slaves and triple-slaves) have significant role in maintaining the connectivity and increasing the throughput.
REFERENCES
[1] T. Shu, S. Cui and M. Krunz, “Medium Access Control for Multi-Channel Parallel Transmission in Cognitive Radio Networks,” Proc. IEEE GLOBECOM, 2006.
[2] D. Cabric and et al., “A Cognitive Radio Approach for Usage of Virtual Unlicensed Spectrum,” Proc. 14th IST Mobile and Wireless Communications, 2005.
[3] S. Huang, X. Liu and Z. Ding, “Opportunistic Spectrum Access in Cognitive Radio Networks,” Proc. IEEE INFOCOM, pp. 1427-1435, 2008.
[4] FCC, “Interference Temperature Operation,” ET docket, vol. 3, no. 237, pp. 07- 78, 2007..
[5] “Report on Spectrum Occupancy Measurements,” Shared Spectrum Co., [Online]. Available: http://www.sharedspectrum.com.
[6] Cordeiro, Carlos, and Kiran Challapali. “C-MAC: A cognitive MAC protocol for multi-channel wireless networks.” New Frontiers in Dynamic Spectrum Access Networks, 2007. DySPAN 2007. 2nd IEEE International Symposium on. IEEE, 2007.
[7] H. Bany Salameh, M. Krunz and O. Younis, “MAC Protocol for Opportunistic Cognitive Radio Networks with Soft Guarantees,” IEEE Trans. Mobile Comp., vol. 8, no. 6, 2009..
[8] J. Qadir and et al, “Multicasting in cognitive radio networks: Algorithms, techniques and protocols,” Journal of Network and Computer Applications, vol. 45, pp. 44-61, 2014..
[9] H. A. Bany Salameh and M. Krunz, “Channel access protocols for multihop opportunistic networks: challenges and recent developments,” Network, IEEE, vol. 23, no. 4, pp. 14-19.
[10] Y. Yuan and et al., “Allocating Dynamic Time-Spectrum Blocks in Cognitive Radio Networks,” Proc. ACM MobiHoc, Sept. 2007.
[11] D. Mahsa and T. Le-Ngoc, “Cognitive MAC Designs for OSA Networks,” 2015.
[12] Z. Gongzheng and et al., “Design and Analysis of Distributed Hopping-Based Channel Access in Multi-Channel Cognitive Radio Systems with Delay Constraints,” IEEE Journal, vol. 32, no. 11, pp. 2026-2038, 2014..
[13] Y. Hou, Y. Shi and H. Sherali, “Optimal Spectrum Sharing for Multi-Hop Software Defined Radio Networks,” Proc. IEEE INFOCOM, pp. 1-9, 2007.. [14] J. Jia, Q. Zhang and X. Shen, “HC-MAC: A Hardware-Constrained Cognitive MAC for Efficient.
Author
Abdullah Ijjeh has received his BSc in Electrical Engineering fro m Kuwait University in 1981. He received his M.Sc. in communication engineering from Yarmouk University, Jordan in 1988. He received his PhD in communication engineering from Polytechnic Institute, St. Petersburg, Russia 1995. Currently he is working at the Department of communication engineering at Al-Balqa` Applied University, Jordan. His research interests are wireless and fibre optics communication systems.
m Kuwait University in 1981. He received his M.Sc. in communication engineering from Yarmouk University, Jordan in 1988. He received his PhD in communication engineering from Polytechnic Institute, St. Petersburg, Russia 1995. Currently he is working at the Department of communication engineering at Al-Balqa` Applied University, Jordan. His research interests are wireless and fibre optics communication systems.

